This page is part of multiple pages about robot configuration and usage. Please choose the robot tag to see an overview.
work in progress, will be changed often to change to screw theory and geometric algebra solution
¶ Introduction
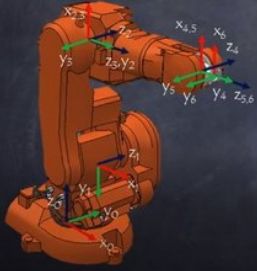
Following is a description of the common 6 axis industrial robot. It has the following axes:
- axis 1 is vertical and axis 2 is horizontal. They cross in one point
- 3 is horizontal, but need not to be parallel to axis 2
- axis 4 "twists" the next arm
- axis 5 is parallel to 2 and 3 again (if axis 4 is 0 degrees)
- axis 6 rotates the endpoint
- axes 4 to 6 cross in one point (intersect)
The basic configuration setting is
M669 B"robotType=6Axis"
6 axis robots are capable to control all 6 degrees of freedom (6DOF).
¶ Configuration
The configuration page describes the code to setup the robot, the screw theory page describes how axes' properties are specified.
¶ G-Code
For the 6 axes, the letters XYZABC are used, all axes being rotary axes, referenced in the document as axes 1 to 6. The arms are referenced as arms 1 to 6, being behind the axes (e. g. arm 2 is between axis 2 and 3).
IJK is not usable, as IJ is used for G2/G3 code.
¶ safety
Care must be taken when the robot is powered off: the arms need protection against falling down with damaging result. The following possibilities avoid it
- using brakes at the joints
- weight balance of every joint, e.g. by using counterweights, so the force downward is below the detent torque and friction of the steppers/gears (servos don't have much detent torque and cannot be used for this method)
- gears like harmonic drive or cycloidal gears change the effect of detent torque. A 1:30 gear will change detent torque of 2 Ncm to 60 Ncm braking effect.
- protection by using springs or dampers
¶ G10 tool offsets
Kinematics uses the G10 settings of the currently selected tool.
¶ Testcases
The following setups were used to test forward and inverse kinematics, so if one uses this configuration, chances are good that the robot works correctly.
¶ Case 1, 2 intersected, 4-6 intersected
This is the setup of the DH example, with the change that axes 1 and 2 intersect.
To ease calculation and make intersection clear, 1-2 and 4,5,6 are set to same point each. The points need to be somewhere on the axis.
Axis 3 can be X, Y offset from 1-2 also for the kinematics to work correctly and it doesn't need to be parallel to axis 2.
| axis # | direction | a point on the axis |
| 1 | 0, 0, 1 | 0, 0, 352 |
| 2 | 0, 1, 0 | 0, 0, 352 |
| 3 | 0, 1, 0 | 0, 0, 712 |
| 4 | 1, 0, 0 | 380, 0, 712 |
| 5 | 0, 1, 0 | 380, 0, 712 |
| 6 | 1, 0, 0 | 380, 0, 712 |
tool: z = length 100 set with G10
GSt(0) must be the tool tip pos/ori
GSt(0), endposition for given angles/positions (rotary/prismatic):
| direction | value |
| x | 0, 0, 1 |
| y | 0, -1, 0 |
| z | 1, 0, 0 |
| pos | 545, 0, 712 |
| angles/pos | 0, 0, 0, 0, 0, 0 |
angle limits:
| axis | angle min | angle max | homing angle |
| 1 | -150 | 150 | 0 |
...
The workspace is ...
singularities are at...